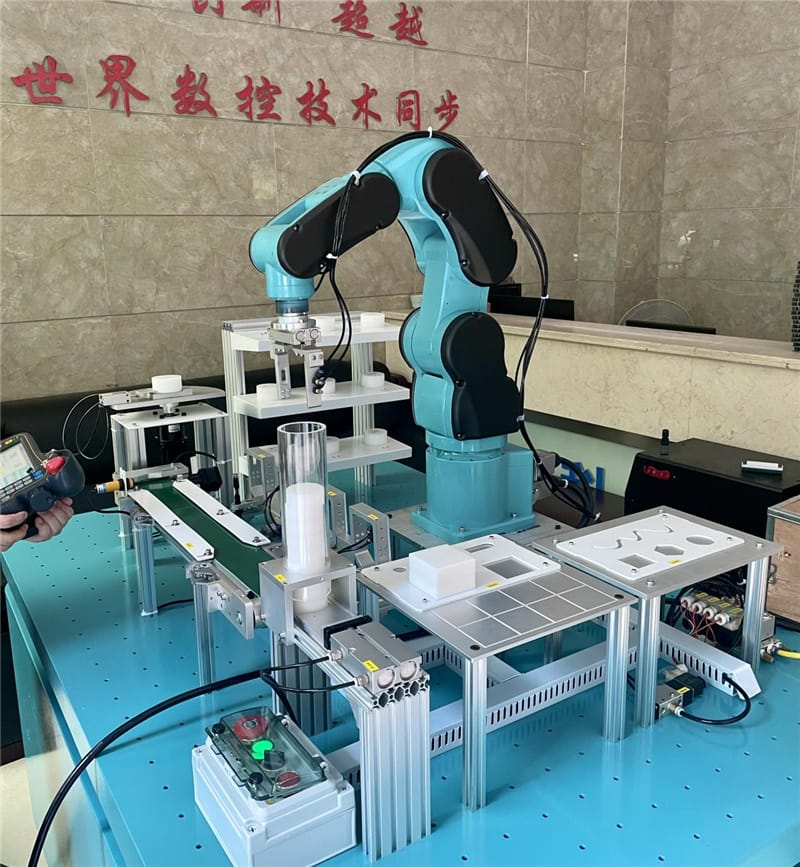




แขนหุ่นยนต์เพื่อการศึกษา 6 แกนหรือแขนหุ่นยนต์แบบมีข้อต่อ DIY Delta หรือแขนหุ่นยนต์กล้อง
ข้อมูลจำเพาะ
แกน:6
น้ำหนักบรรทุกสูงสุด: 4กก.
ตำแหน่งที่ซ้ำ: ±0.01มม.
ความชื้นในการใช้งาน: 20-80%
สภาพแวดล้อมเซจ: 0℃-45℃
การติดตั้ง: สายดิน
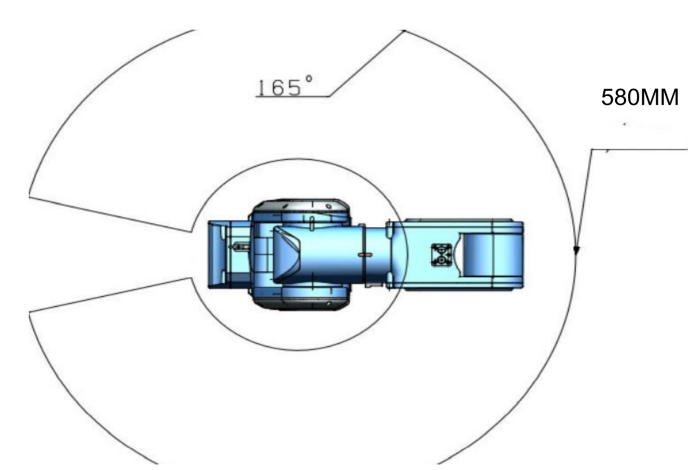
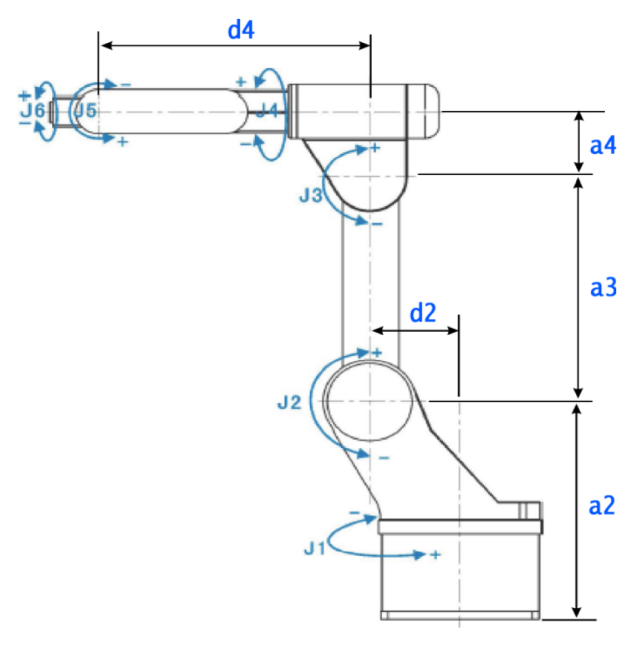
ช่วงการทำงาน: J1:±165°
เจ2:-100°~+120°
J3: +150° ~-60°
เจ4:±175°
J5:+130° ~-30°
J6:±180°
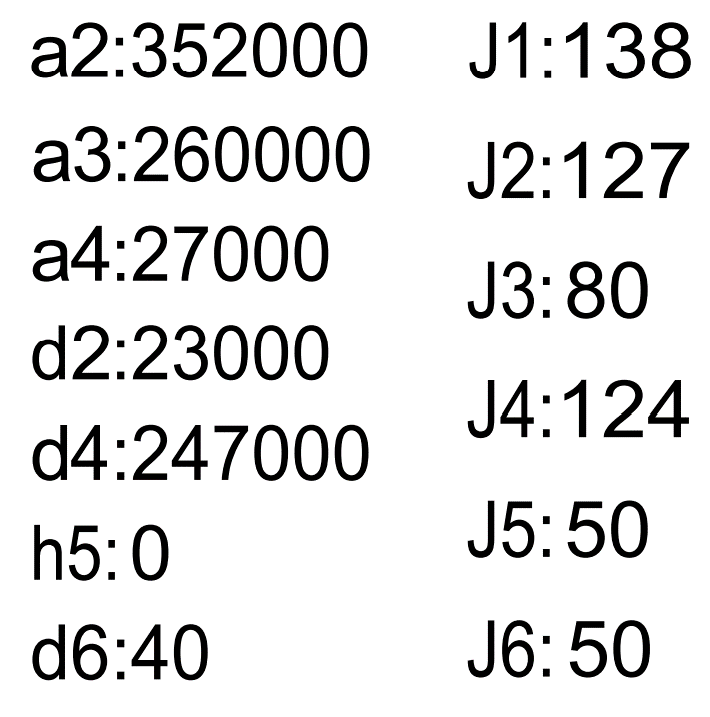
ความเร็วสูงสุด: J1:260°/วินาที
J2:250°/วินาที
J3:250°/วินาที
J4:250°/วินาที
J5:200°/วินาที
J6:760°/วินาที
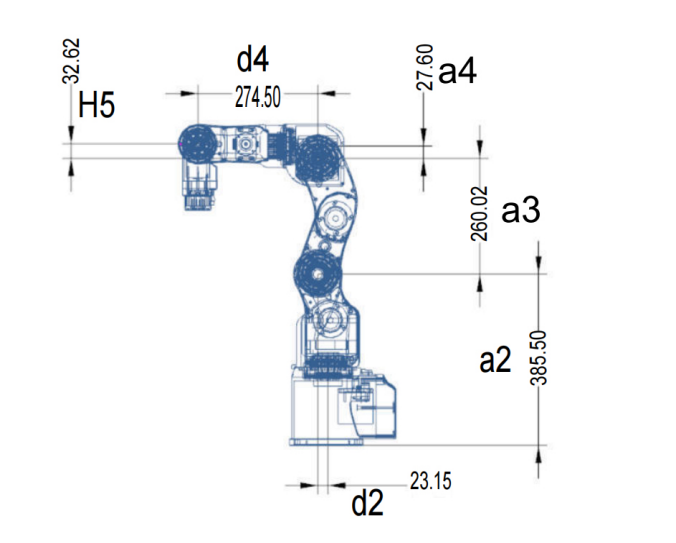
ช่วงการทำงาน:
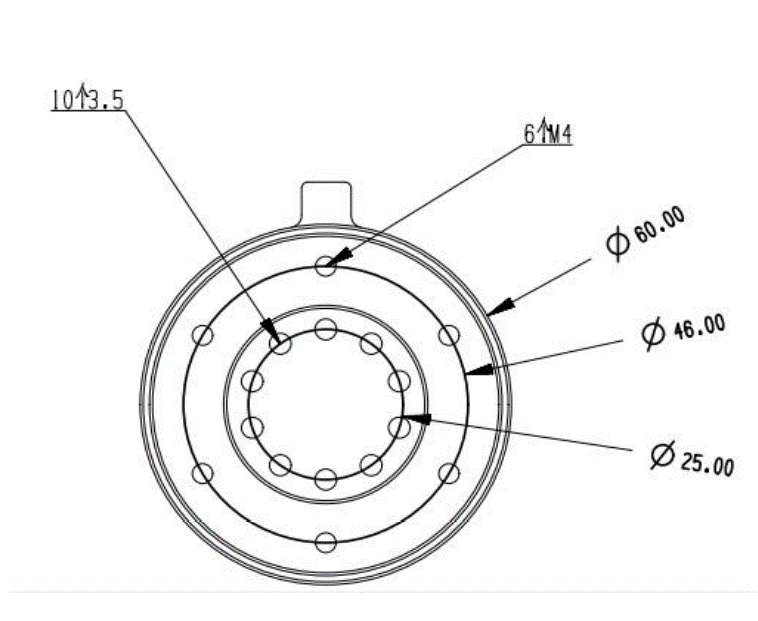
การติดตั้งฐาน:
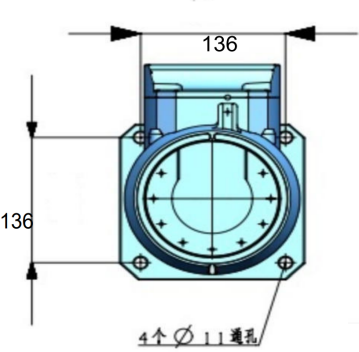
การติดตั้งฐาน:
แอปพลิเคชั่น
การประยุกต์ใช้ด้านการศึกษา:
1. เพื่อศึกษาองค์ประกอบพื้นฐานของระบบหุ่นยนต์
2. เพื่อศึกษาฟังก์ชันการเขียนโปรแกรมและการสอนของจี้สอนหุ่นยนต์
3. เพื่อศึกษาความรู้พื้นฐานเกี่ยวกับการเขียนโปรแกรมหุ่นยนต์ออฟไลน์
4. เพื่อศึกษาการทำงานและการเขียนโปรแกรมใช้งานหุ่นยนต์ไอโอที
5. เพื่อศึกษาการประยุกต์ใช้งานภาพหุ่นยนต์
ฉากโฆษณา: หุ่นยนต์ไอศกรีม หุ่นยนต์บาร์เทนเดอร์ หุ่นยนต์กาแฟ หุ่นยนต์ชานม ฉากอุตสาหกรรมเบา: การวัด การจ่าย การตรวจสอบ การคัดแยก
คุณสมบัติผลิตภัณฑ์
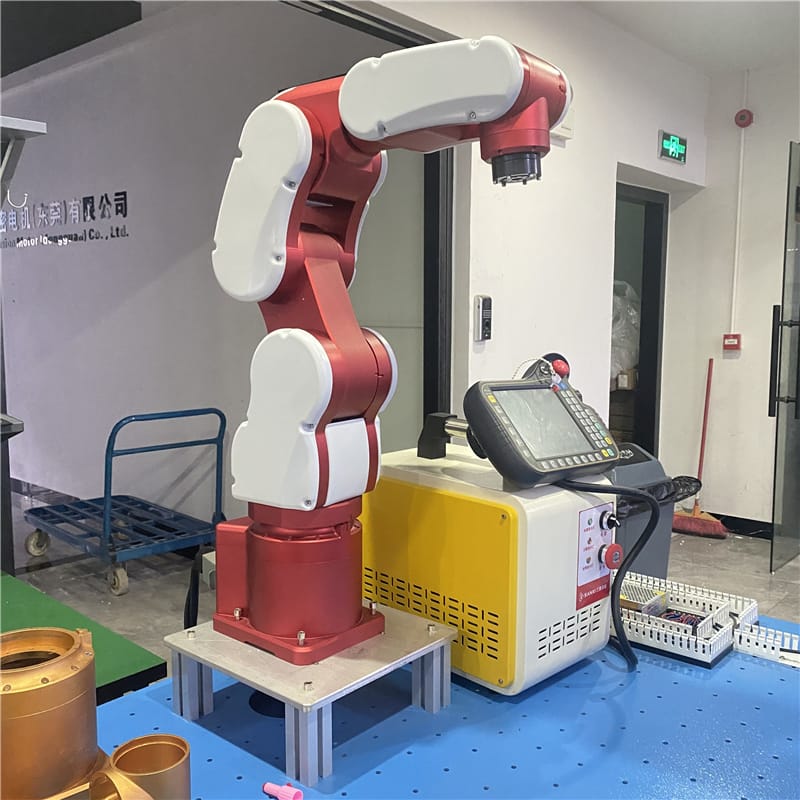
แขนหุ่นยนต์: แขนหุ่นยนต์ทำจากอลูมิเนียมหล่อผ่านศูนย์การกลึง CNC และพ่นพื้นผิวด้วยพลาสติกและมีรูปลักษณ์สวยงาม
รูสายเคเบิลสำรอง: แขนหุ่นยนต์มีรูสายเคเบิลสำรองซึ่งสวยงามและไม่ขัดขวางการทำงานของหุ่นยนต์ ปลายของหลอดลมถูกสงวนไว้สำหรับพอร์ตและขั้วต่อสายเคเบิลข้อมูล
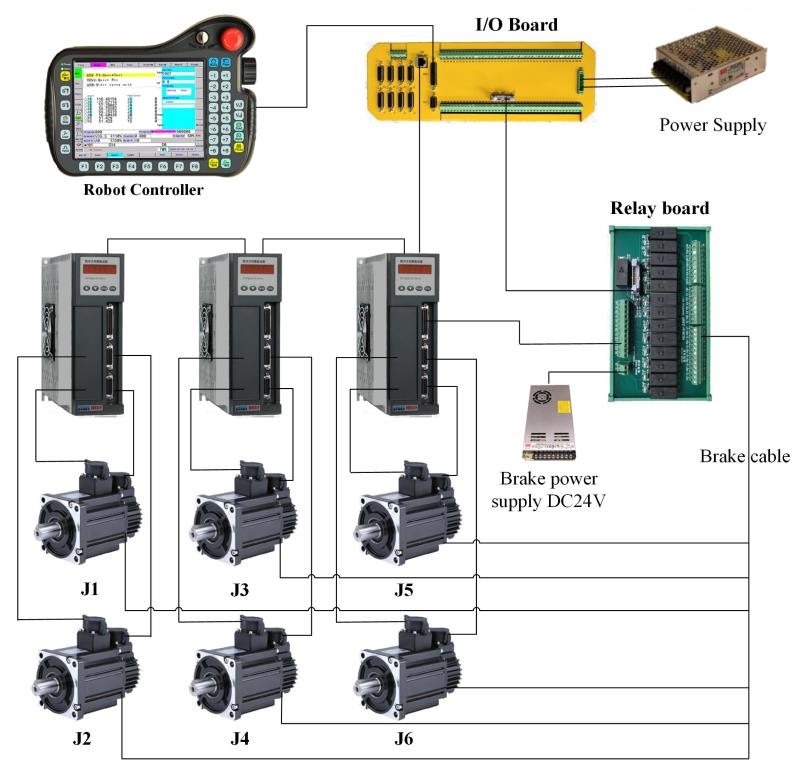
แผงควบคุม: จอ LCD ขนาดใหญ่ วิธีการแสดงภาษาสามารถเลือกได้ตามความต้องการของลูกค้า การใช้งานและการตั้งโปรแกรมที่เรียบง่ายและชัดเจน พร้อมด้วยฟังก์ชันการปรับเปลี่ยนพารามิเตอร์ออนไลน์และการวินิจฉัยข้อผิดพลาดด้วยตนเอง
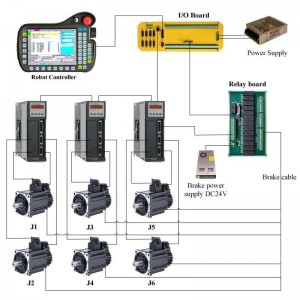
ตู้ควบคุมหุ่นยนต์: ระบบควบคุมการเคลื่อนที่อัจฉริยะนำเทคโนโลยีคอมพิวเตอร์อุตสาหกรรมมาใช้ และโมดูลเซอร์โวดิจิทัลทั้งหมดให้พลังขับเคลื่อนแก่มอเตอร์เซอร์โว AC ของข้อต่อแต่ละข้อของหุ่นยนต์
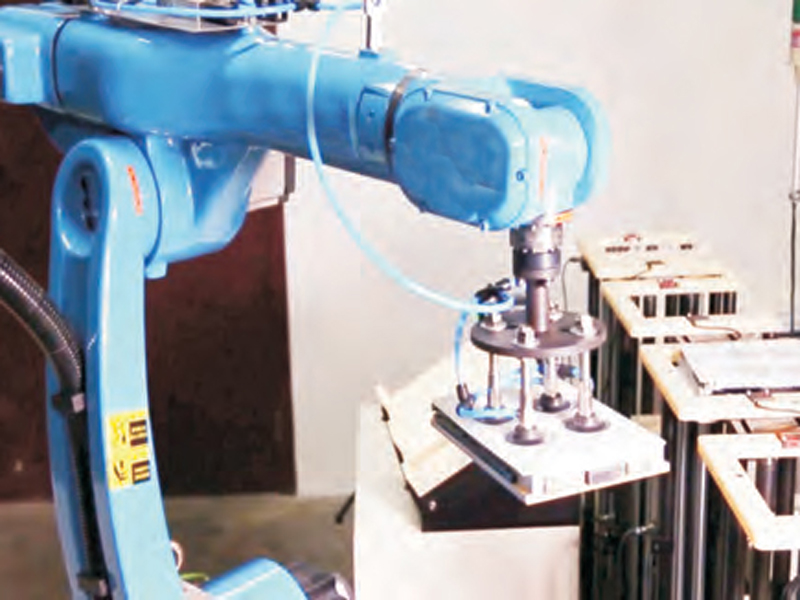
อุปกรณ์ติดตั้งหุ่นยนต์: อุปกรณ์ติดตั้งเครื่องมือสามารถเลือกแรงโน้มถ่วงและปริมาณที่แตกต่างกันตามความต้องการที่กำหนดเอง และติดตั้งไว้ที่หน้าแปลนด้านปลาย ซึ่งปรับได้ง่ายและมีขอบเขตการใช้งานที่หลากหลาย